


2020精彩同济,学以精工,同济学子带着云上创新实践作品的模型又双叒叒走来了!
本期展示的内容是同学们循迹小车类创新制作的部分项目。循迹小车类创新制作项目需要同学们根据需求自行采购开发板、传感器、转接板等零件及配件,设计原理图和电路图,独立组装小车零部件,然后通过程序编写和调试实现循迹、避障、出库入库等功能。
在该项目制作过程中,同学们综合应用了机电一体化技术,充分体现了STEAM教育理念(即Science科学、Technology技术、Engineering工程、Art艺术、Mathematics数学),重点培养了学生们利用Arduino软件的编程能力,在整车的加工、装配和调试过程中,全方位地提高了动手能力,为后续的课程学习打下了良好基础。
循迹小车项目
1、智能循迹小车-1
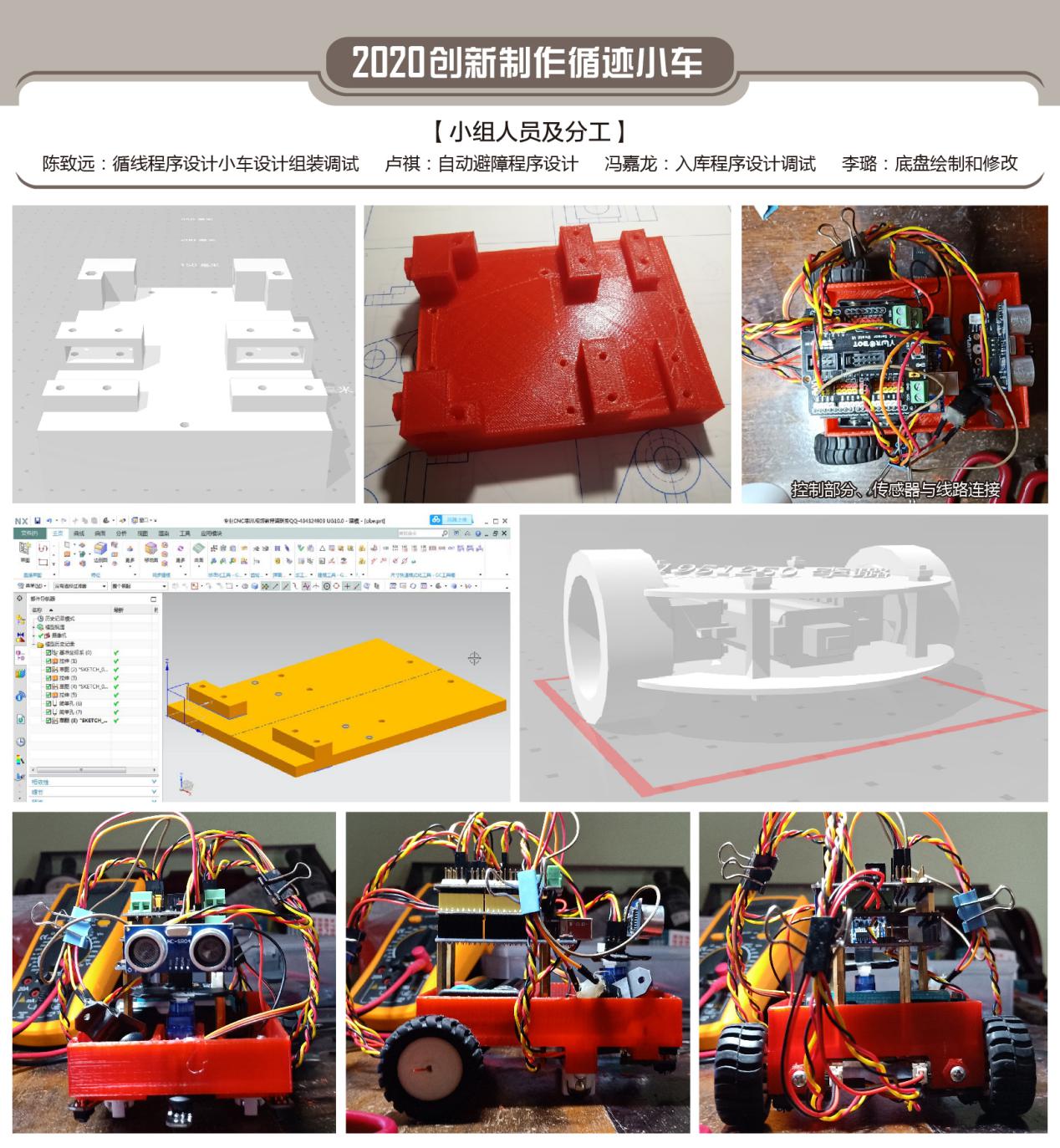
制作人姓名:陈致远、卢祺、冯嘉龙、李璐
作品简介:该作品以Arduino Uno作为控制板,采用双独立主动轮,用红外对管传感器构建循线控制系统,以超声波传感器进行障碍检测,通过霍尔传感器识别以磁铁为车库的特殊标识,最终完成全部的规定动作。
技术工艺:3D打印、电子电工、钳装、软件编程、激光切割
2、智能循迹小车-2
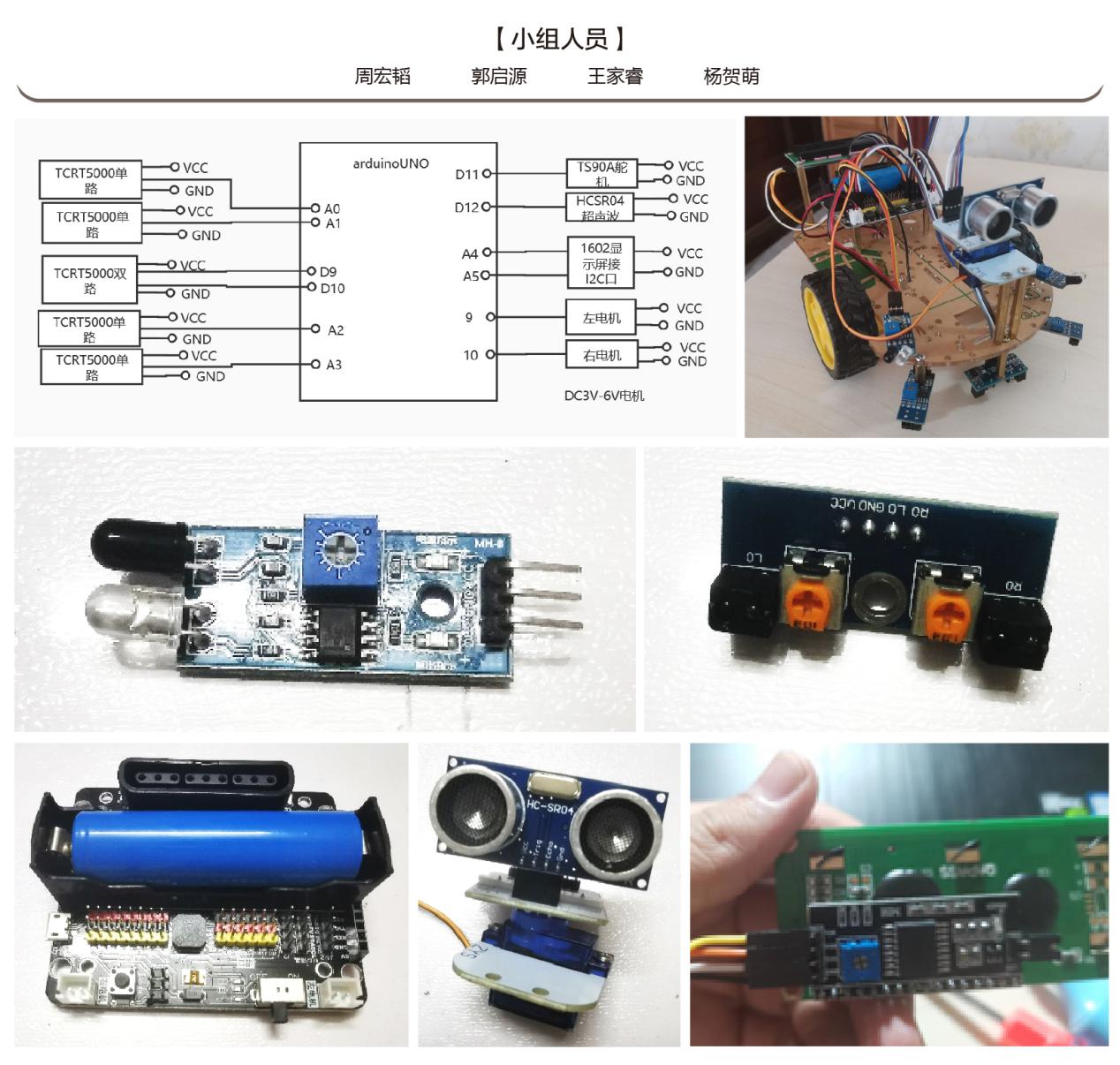
制作人姓名:周宏韬、郭启源、王家睿、杨贺萌
作品简介:作品选用Arduino Uno为开发板,采用双并排红外传感器的方式实现循迹,实现了全部的运动功能。
技术工艺:3D建模、电子电工、钳装、软件编程
3、智能循迹小车-3
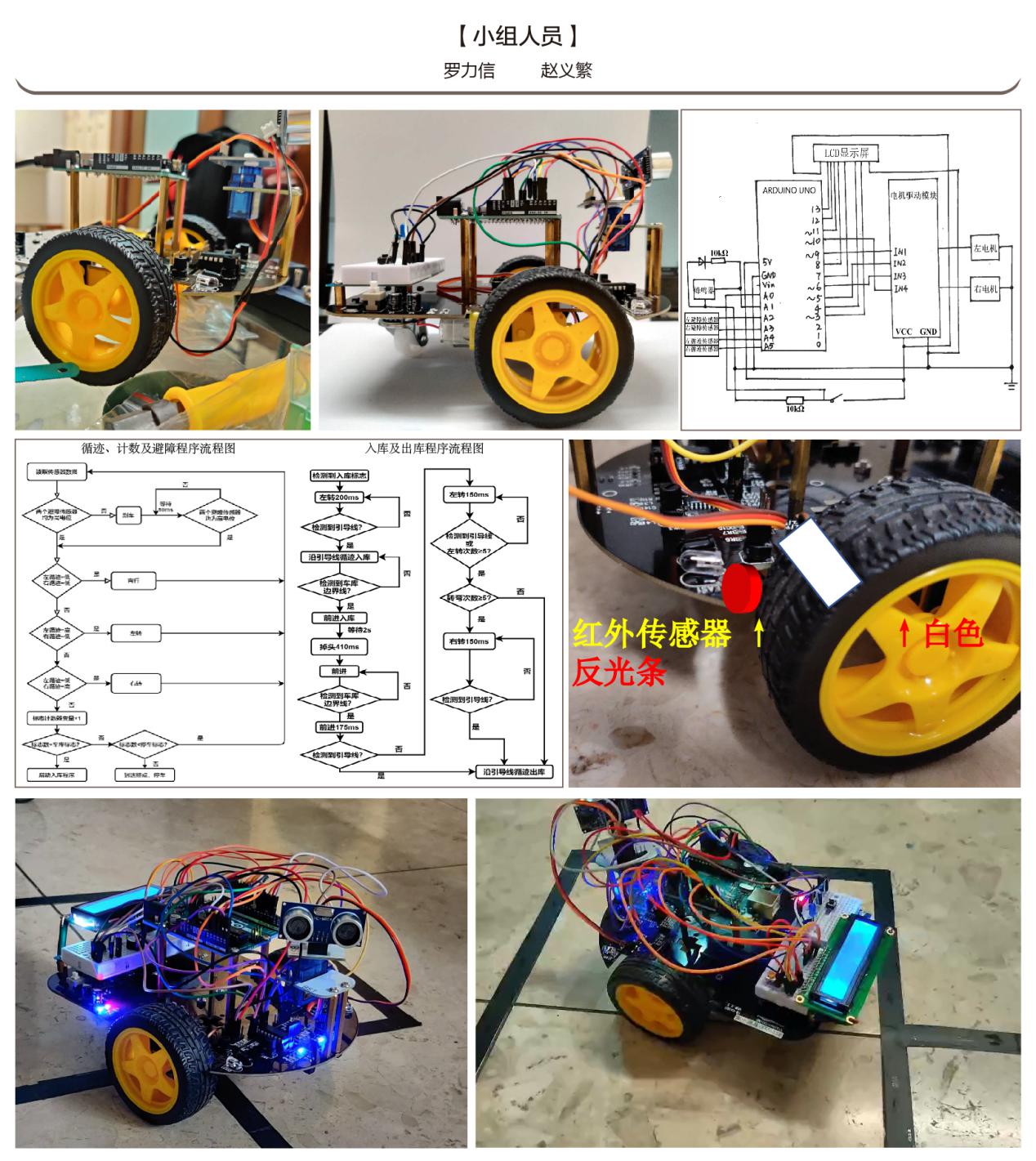
制作人姓名:罗力信、赵义繁
作品简介:作品以Arduino Uno为开发板,利用车头的2个红外线传感器实现循迹,通过读取传感器的状态修正小车的位置,顺利完成了全部的规定动作要求。
技术工艺:电子电工、钳装、软件编程、装配
4、智能循迹小车-4
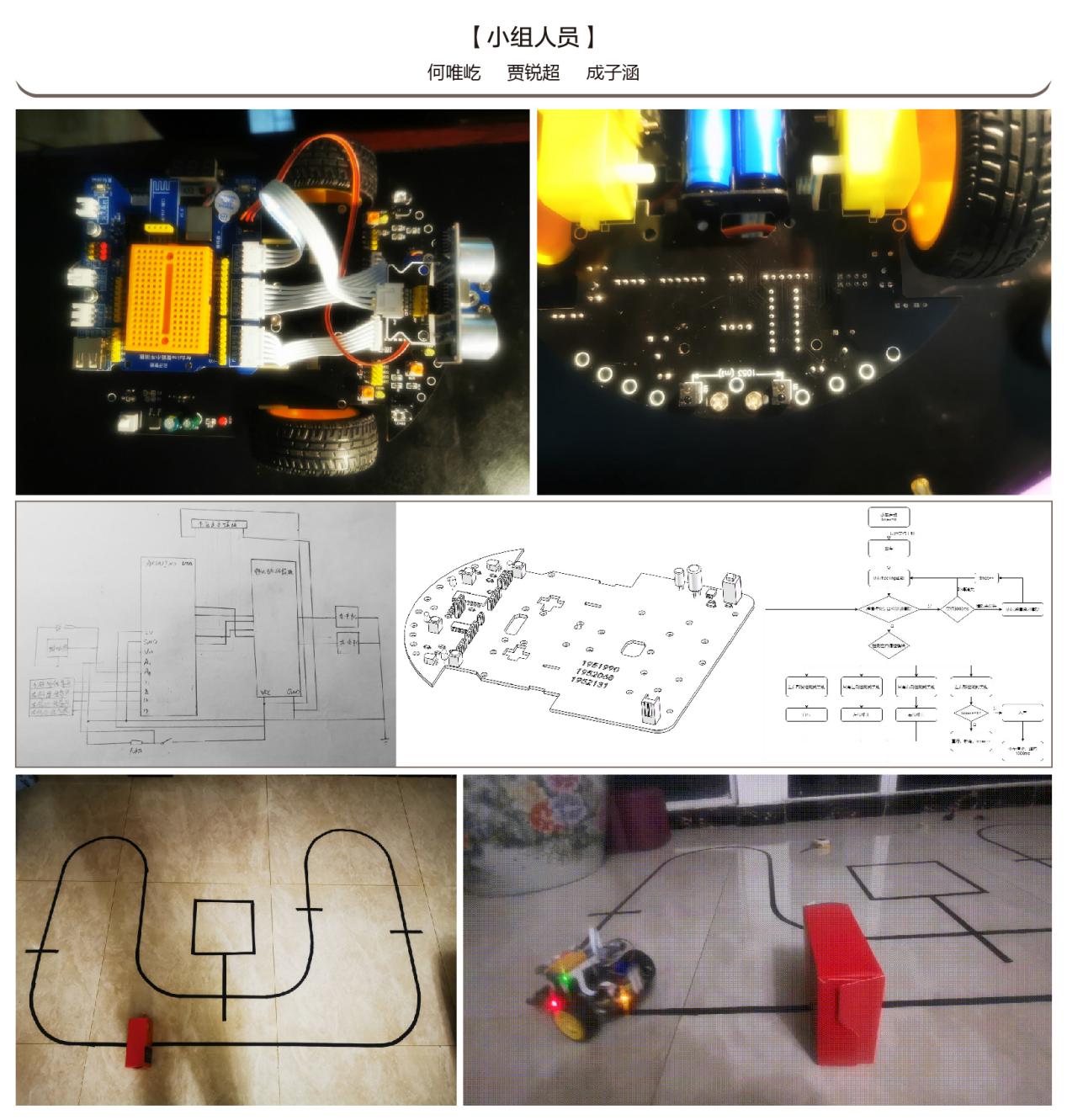
制作人姓名:何唯屹、贾锐超、成子涵
作品简介:该作品采用左右2个红外感应模块,探测黑线信号进行循迹、修正和避障,并检测、计数轨迹上的标记点,通过设立时间长度闸值避免干扰,实现入库出库,实现了所有规定动作要求。
技术工艺:3D建模、电子电工、钳装、软件编程、装配
5、智能循迹小车-5

制作人姓名:赵子奇、周舒琪、杨欢、陈正扬
作品简介:该作品设有四路红外传感器,采用超声波避障原理,利用左右轮差速实现转弯、出库入库等,完成了所有动作要求。
技术工艺:3D建模、电子电工、钳装、软件编程、激光切割
6、智能循迹小车-6
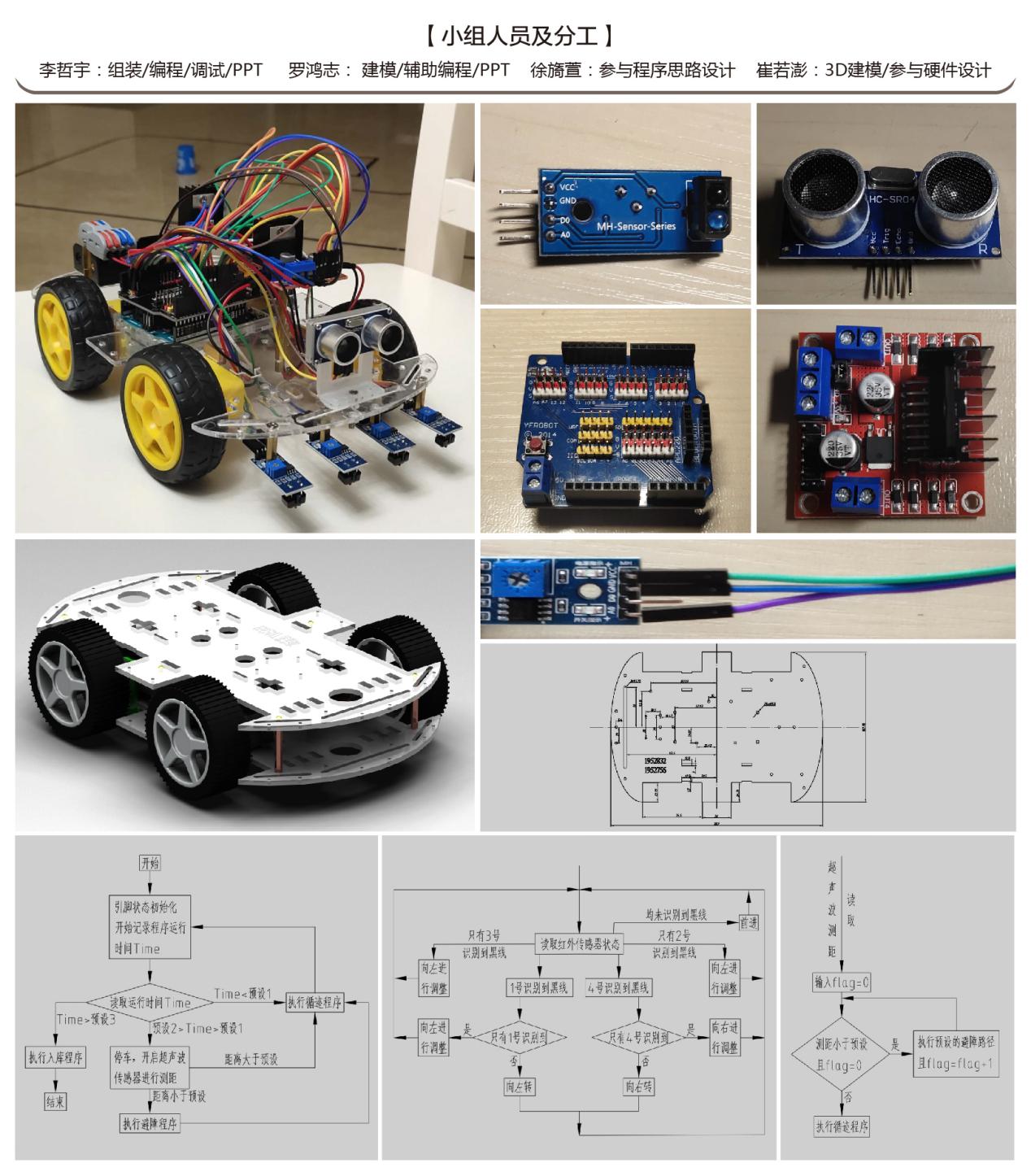
制作人姓名:李哲宇、罗鸿志、徐旖萱、崔若澎
作品简介:作品使用Arduino Uno为传感器扩展板,通过四路红外传感器实现循迹,顺利实现了规定的所有动作。
技术工艺:3D建模、激光切割、电子电工、钳装、软件编程
7、智能循迹小车-7

制作人姓名:朱柯鸣、郑乔那、邓佳芃、周毅华
作品简介:作品头部设置了云台板舵机和超声波模块,后部设有Arduino板和转接板,小车利用超声波传感器探测停车桩的位置,实现了所有规定动作。
技术工艺:3D建模、激光切割、电子电工、钳装、软件编程
8、智能循迹小车-8
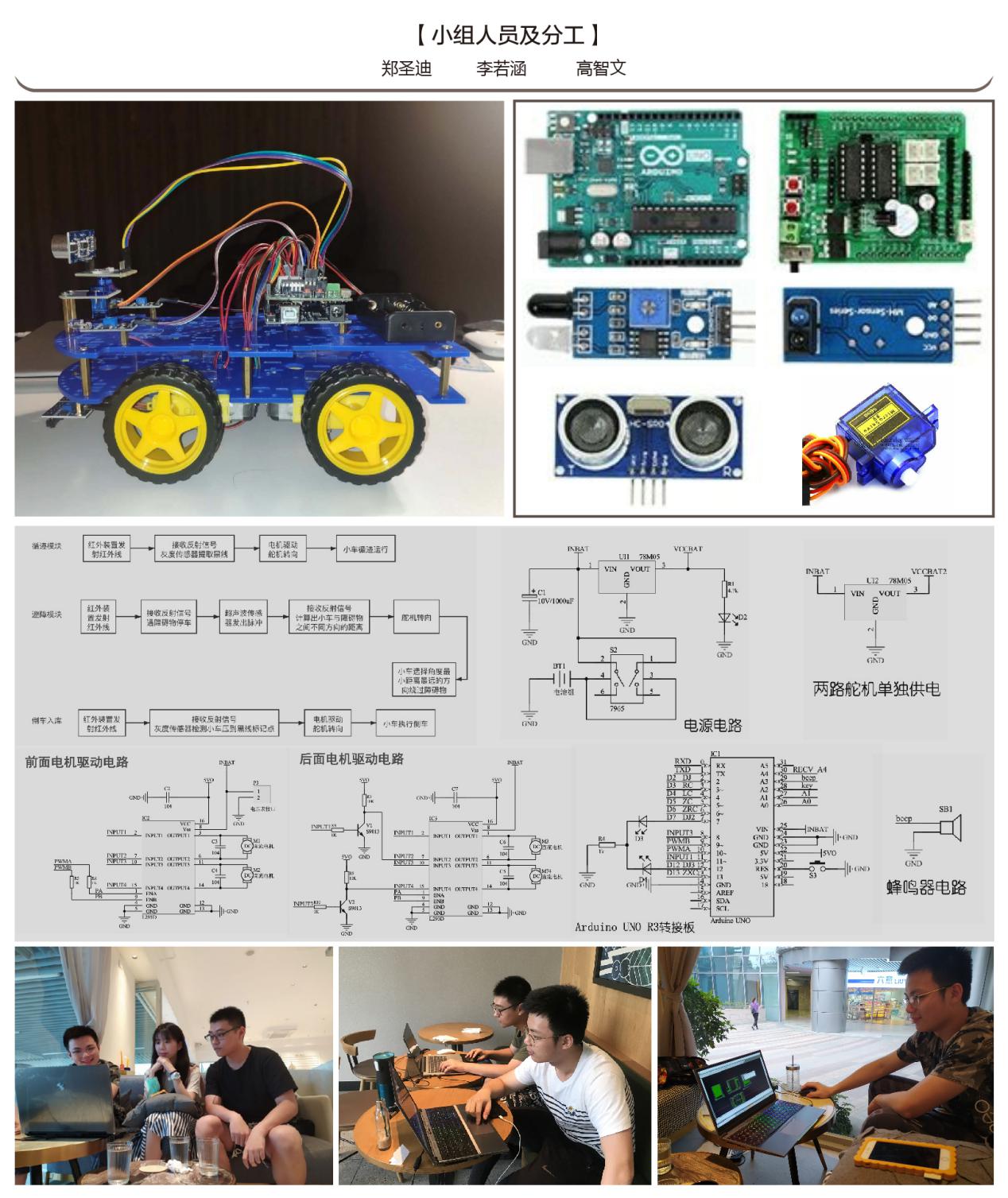
制作人姓名:郑圣迪、李若涵、高智文
作品简介:该作品采用Arduino Uno控制板,读取反射的信号红外线信号实现循迹,根据超声波传感器发出脉冲的时间差实现避障,以红外发射器和灰度传感器的检测方式实现倒车入库,实现了规定动作。
。
技术工艺:3D建模、激光切割、电子电工、钳装、软件编程
9、智能循迹小车-9

制作人姓名:严德裕、赖宇辰、周嘉怡
作品简介:作品采用Arduino Uno开发板,配套电机扩展板,电子原件为红外循迹传感器、红外避障传感器、液晶屏、电位器、超声波测距模块和蜂鸣器,实现了所有的规定动作。
技术工艺:电子电工、钳装、软件编程
10、智能循迹小车-10
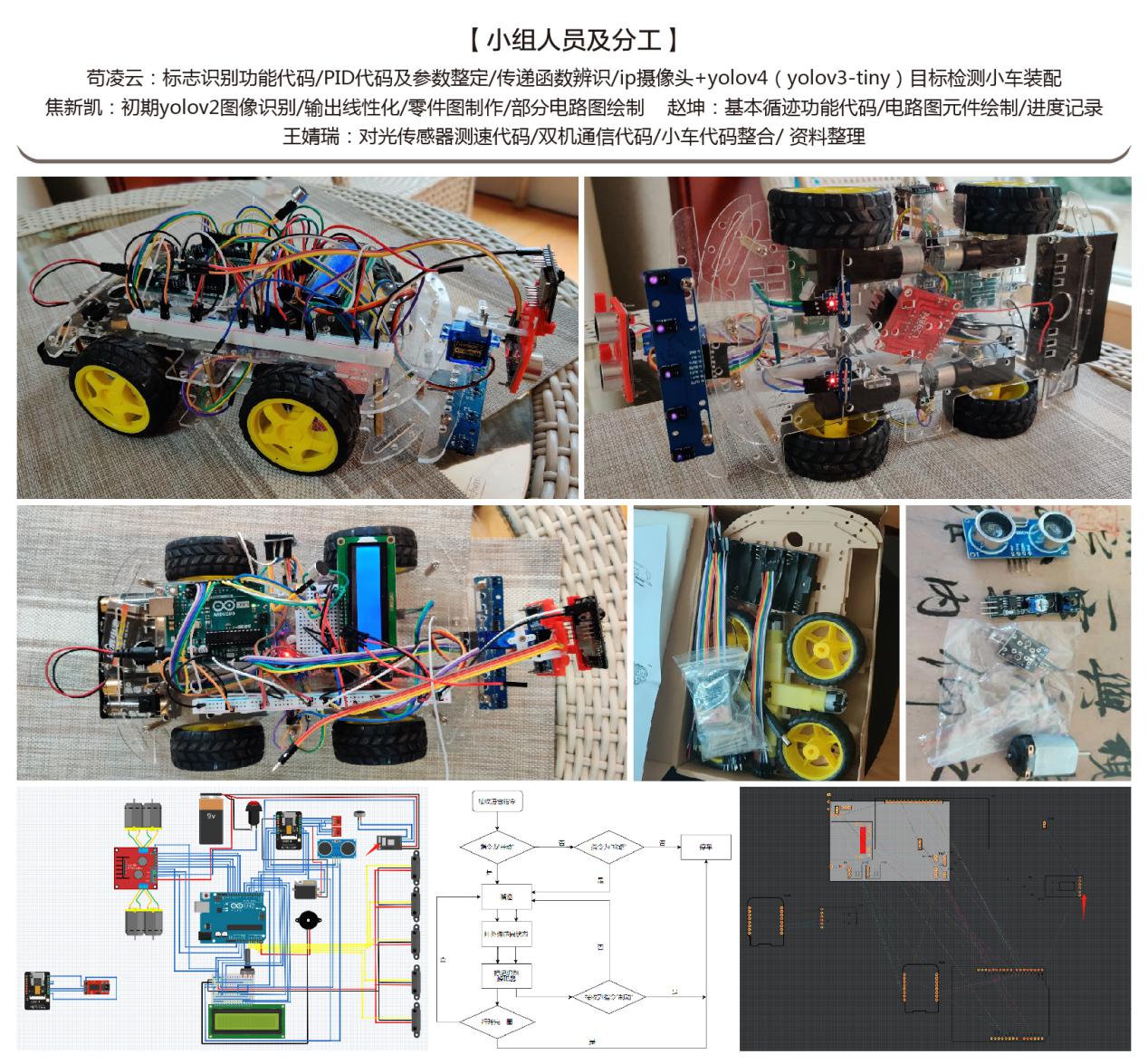
制作人姓名:苟凌云、焦新凯、王婧瑞、赵坤
作品简介:作品为五路循迹小车,选用L28N电机模块、TS90A舵机模块、HC-HR04超声模块等,并运用PID控制提高小车的精度,顺利完成了规定动作。
11、智能循迹小车-11
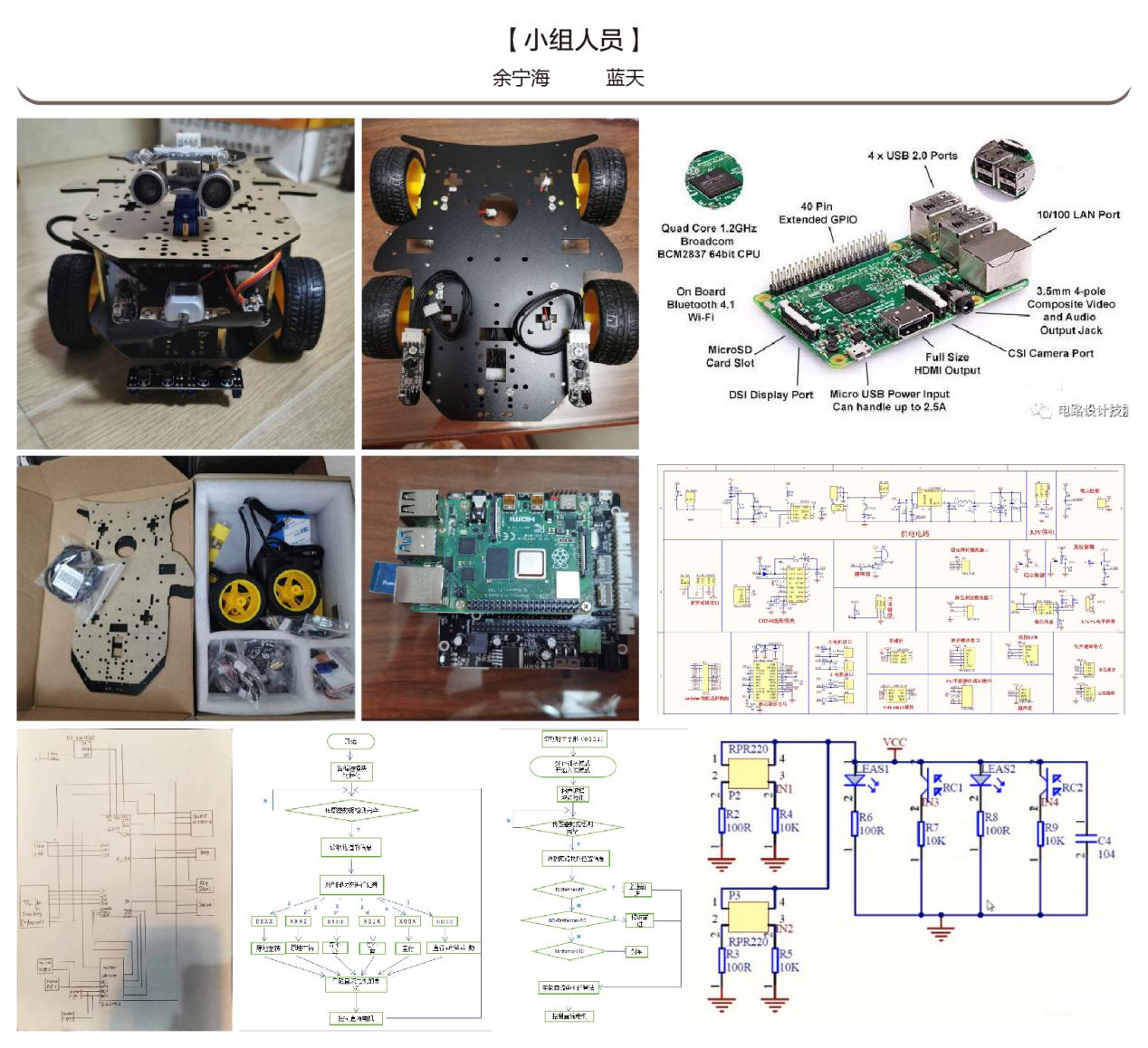
制作人姓名:余宁海、蓝天
作品简介:该作品以树莓派为连接板,对四路直流减速电机的控制采用TB6612FNG驱动芯片,设计了3个LED灯管作为强光照明模块,实现了所有规定动作。
技术工艺:3D建模、激光切割、电子电工、软件编程、钳装
12、智能循迹小车-12
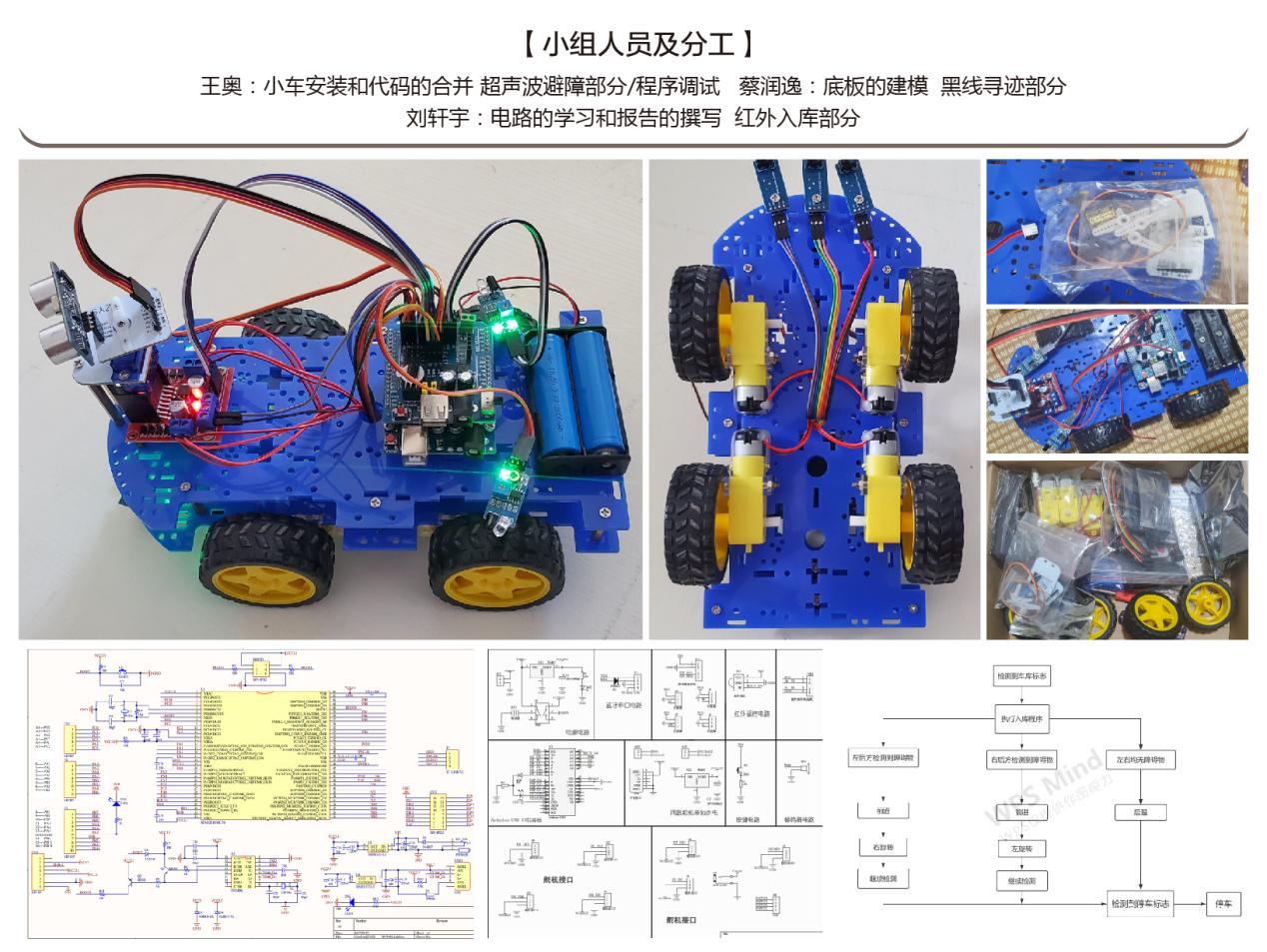
制作人姓名:王奥、刘轩宇、蔡润逸
作品简介:该作品由ZYSTM32主板、UNO功能转接板、双轴直流减速电机、红外传感模块、超声波避障模块、红外循迹模块等部分组成,实现了所有规定动作。
技术工艺:3D建模、激光切割、电子电工、软件编程、钳装
13、智能循迹小车-13
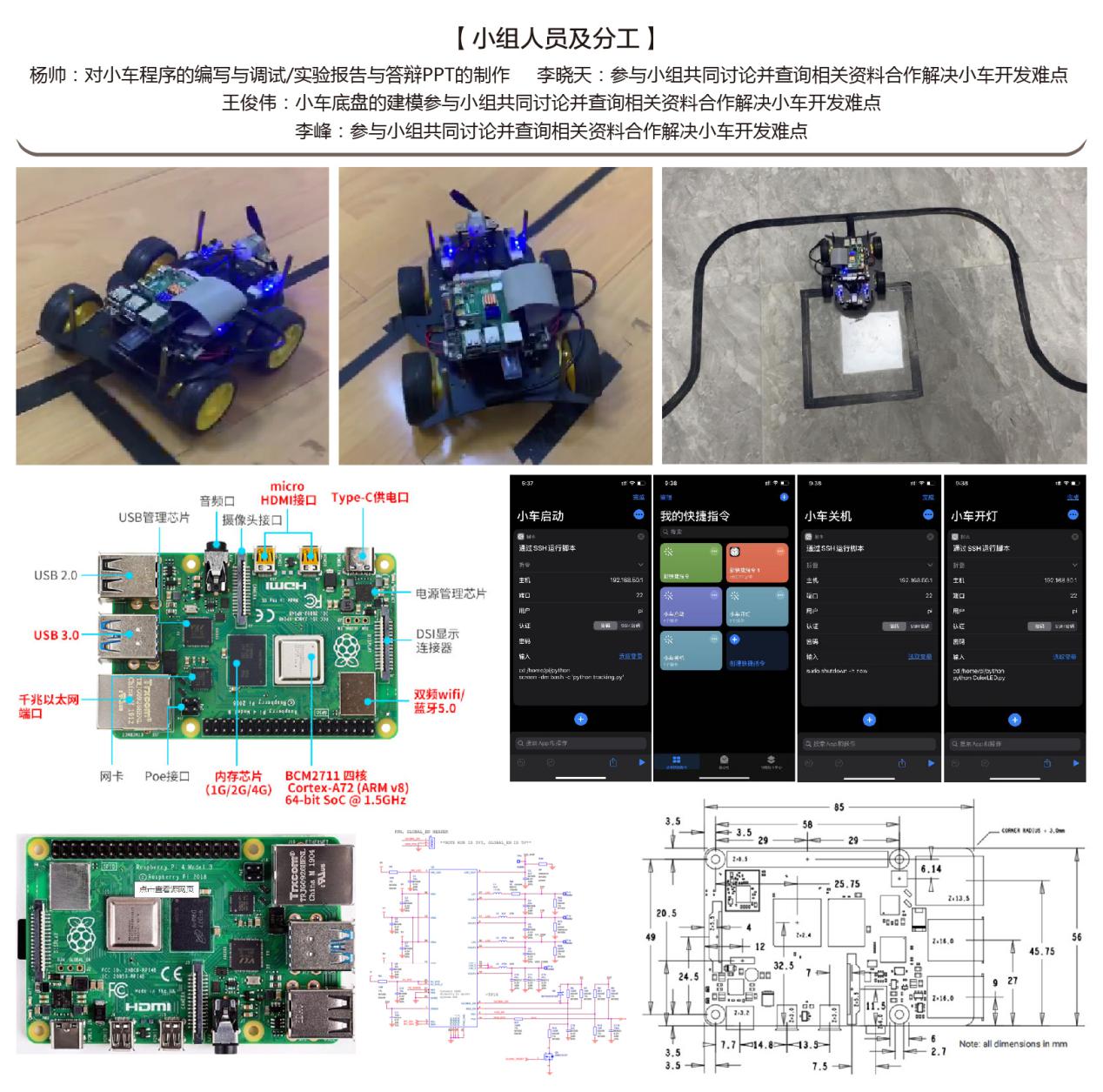
制作人姓名:杨帅、李晓天、王俊伟、李峰
作品简介:该作品主要以树莓派为控制主板,包括四路红外循迹探头和电机,通过设置时间变量控制节点来实现小车行驶的稳定性和转向精确度,最终实现了规定的动作。
技术工艺:电子电工、软件编程、钳装
14、智能循迹小车-14
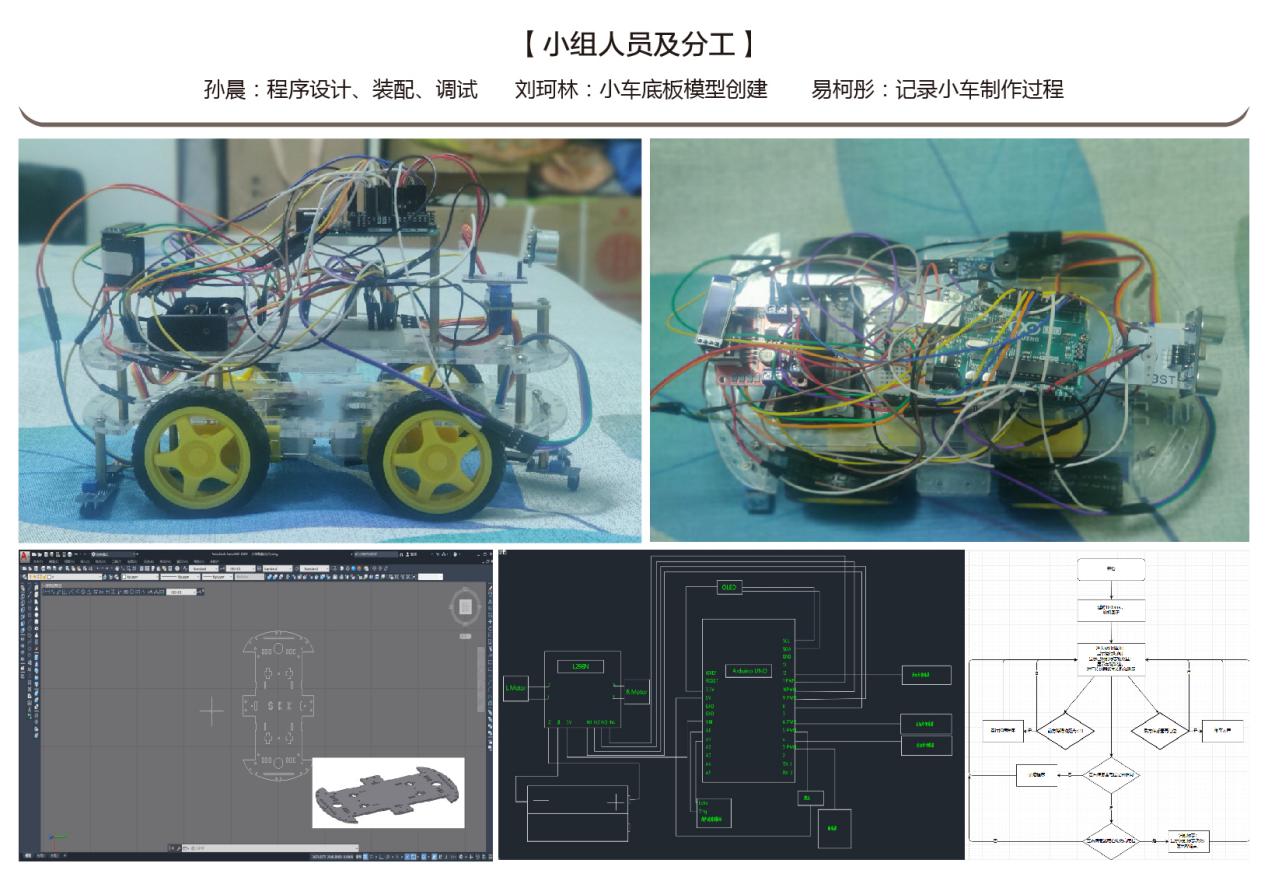
制作人姓名:孙晨、刘珂林、易柯彤
作品简介:该作品设置了有限循环和条件循环,以实现分支程序中传感器的循环读取,通过定义额外的全局变量,控制分支的执行次数,利用编写的servopulse函数,避免人为控制舵机转向产生冲突,最终完成了所有的规定动作。
技术工艺:3D建模、激光切割、电子电工、软件编程、钳装
15、智能循迹小车-15
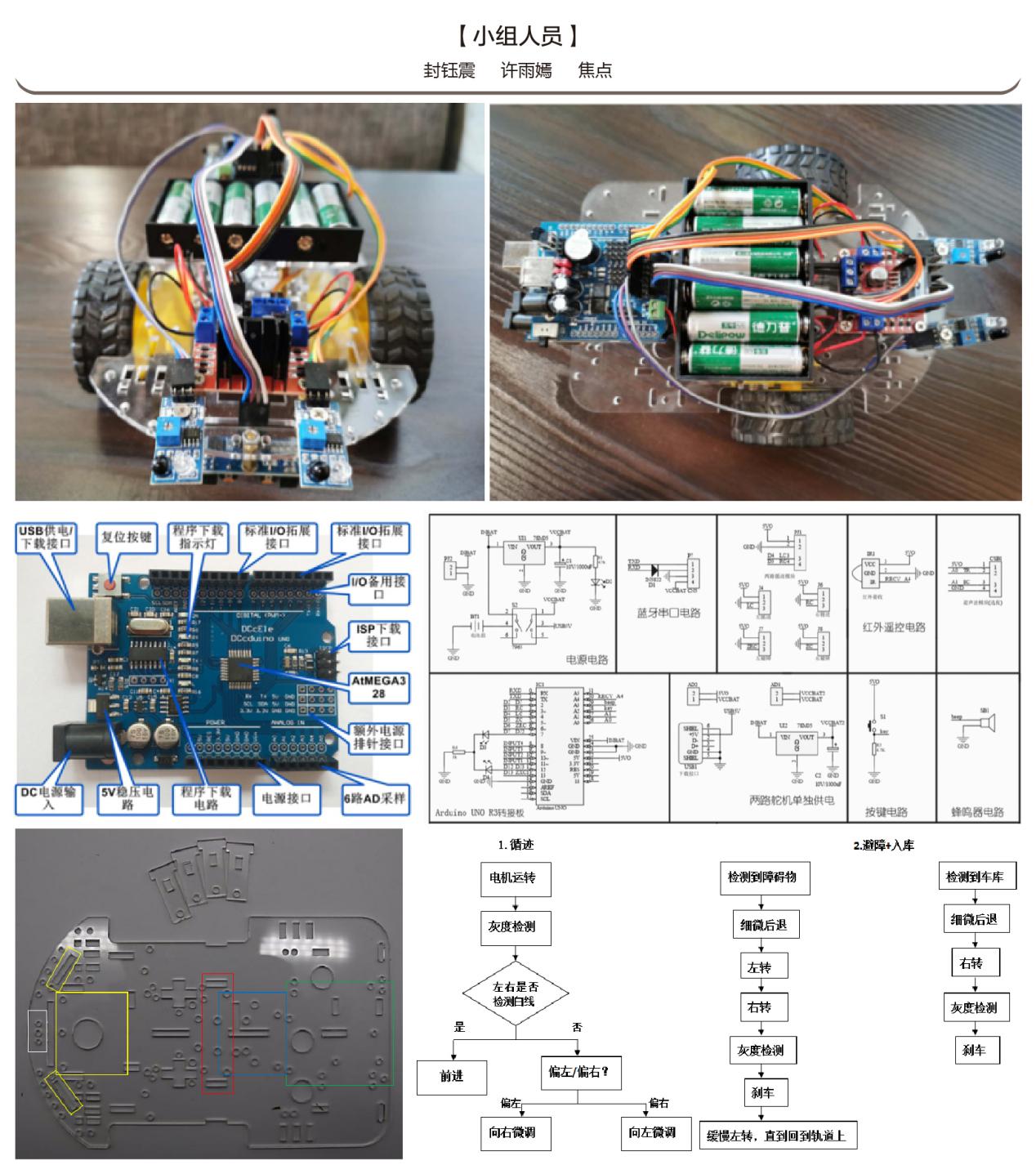
制作人姓名:封钰震、许雨嫣、焦点
作品简介:作品以Arduino UNO R3为控制板,ZYV6为功能转接板,配以2个双轴直流减速电机,设置基础的避障模块和两路循迹模块,最终实现了所有规定动作。
技术工艺:3D建模、电子电工、钳装、激光切割、软件编程
16、智能循迹小车-16

制作人姓名:白宇恒、程帅虎、李子杰、史超逸
作品简介:该作品基本由底板、车轮和马达组成,使用灰度传感器和红外避障传感器为传感系统,采用马达驱动模块和纳英特核心板进行控制,最终实现了所有规定动作。
技术工艺:3D建模、电子电工、钳装、软件编程
17、智能搬运小车
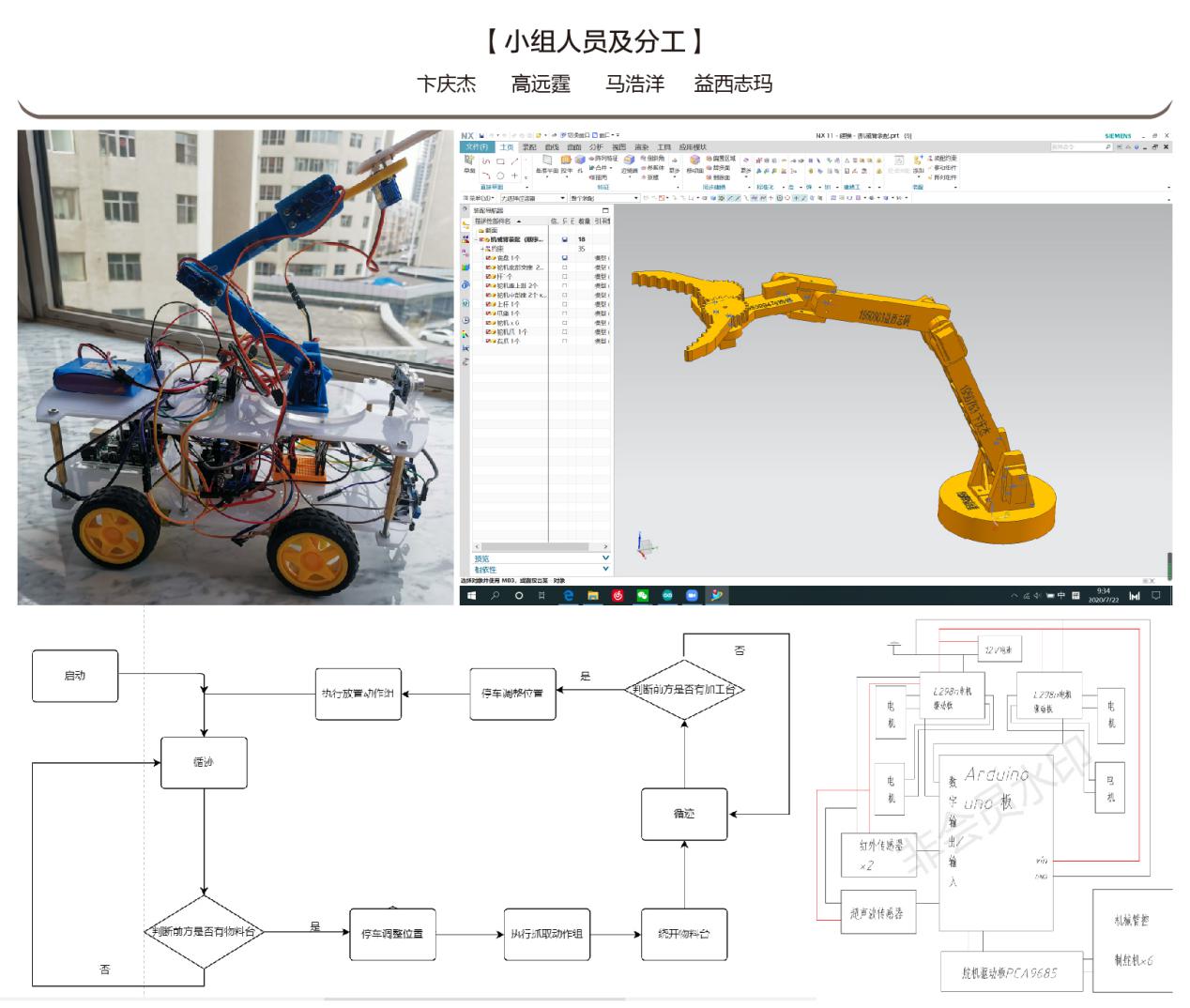
制作人姓名:卞庆杰、高远霆、马浩洋、益西志玛
作品简介:作品为四轮机械臂小车,主要以Arduino进行程序编辑,采用驱动直流电机,利用两轮间的转速差实现转向,最终实现了所有规定动作。
技术工艺:3D建模、激光切割、电子电工、钳装、软件编程
18、蛋头先生
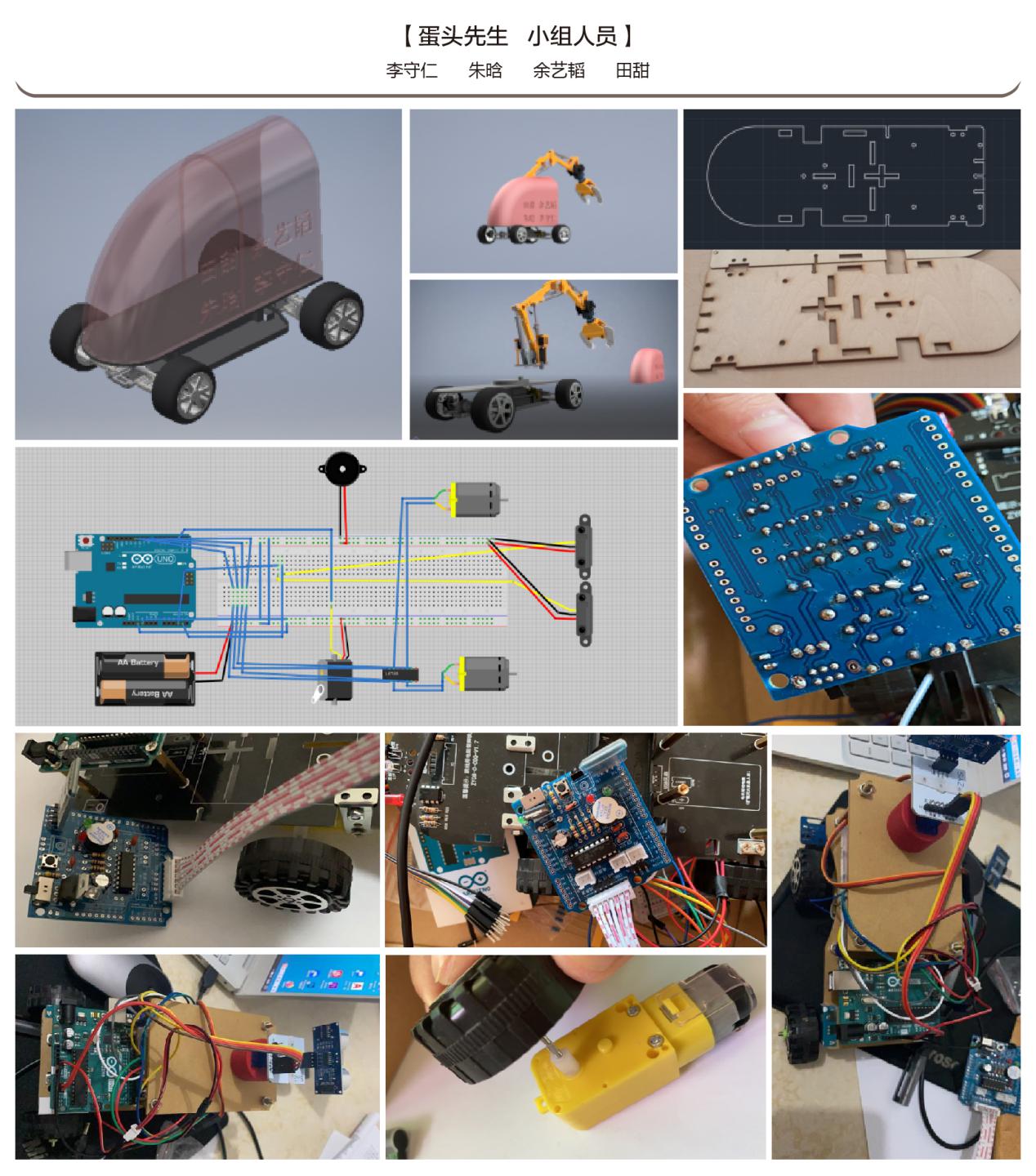
制作人姓名:李守仁、朱晗、余艺韬、田甜
作品简介:该作品车头呈蛋形,采用Arduino控制板,通过红外检测黑白线输出高低电平实现循迹,利用超声波测距实现避障功能,最终实现了所有规定动作。
技术工艺:3D建模、电子电工、钳装、激光切割、软件编程
19、智能驾驶小车
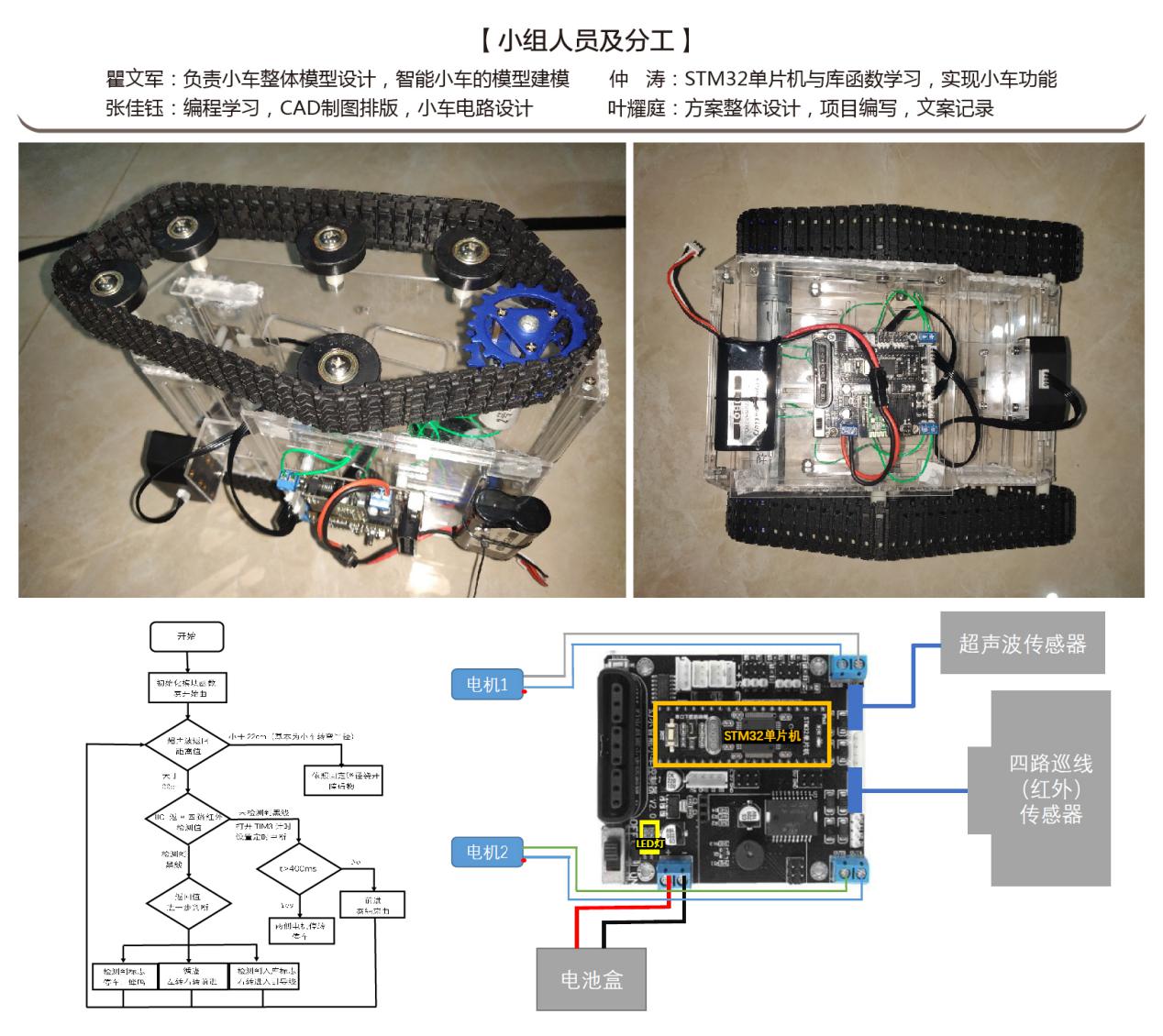
制作人姓名:翟文军、仲涛、张佳钰、叶耀庭
作品简介:该作品为四电机小车,配以电量检测、蜂鸣、PWM波形变速控制等模块功能,并安装了腰带轮,最终小车完成了所有的规定动作。
技术工艺:3D建模、电子电工、钳装、激光切割、软件编程
——————END——————

